 PIC16F84 microprocessor is used. Size : 7X4.5cm less than 20g.
PIC16F84 microprocessor is used. Size : 7X4.5cm less than 20g.Circuit
{kind=link}
Program file
This was tested with F103LM as before at parking area nearby my home.
Yes ! Now We can measure the cornering-force during the circuit-run.
Rev-Logger'G'
00/09/24
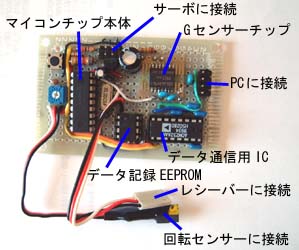
This time, I made a device that can measure acceleraition at intervals of 10ms. Along with this, sttering rate and revolution of the motor were measured in 300ms intervals.
Spec.
Measuring, and recording for 170 sec.
Data can be downloaded to computers via RS232C.
PIC16F84 microprocessor is used. Size : 7X4.5cm less than 20g.
Circuit
Program file
This was tested with F103LM as before at parking area nearby my home.
Above is the graph which excerpted ( the 30 - 60 s section in 170 seconds ) a part. The blue square is steering oparation rate ( left to up, right to down side), and the light blut dots are accelerationto side direction; a cornering force. Notice right side acceleration is up side of the scale.
Great !! That's it I wanted. Very reasonable data.
Below is acceleration and velocity.
Orange circle is velocity (left scale). There is a point to fail to take, but it is working.
I was surprised at a large vibration width. Especially, since then of 55 seconds, the width of "vibration" is equal to or more than 1 G.( In the perfection example in high-speed cornering, the dispersion value of vibration was to about 0.2 G be ).
Then, The unit was tested at circuit.
Because there was not enough time to adjust a rev-sensor sensitivity, the speed log didn't be measured this time, but it was perfect for G-logging ! I did it !!
To reduce "vibration" noise, I calculated the average in 300ms.
Below is the graph before smoothing
After smoothing...
Blue is steering, red is smoothed G.
Great ! It looks very good.
Analysis of these data on a viewpoint of correlation between cornering-force and sttering operation mekes me much interested.
1. At a parking X axis means value of sterring operation, Y is cornering force smoothed in 0.3s term. It was found there are two kinds response, one is linear, proportional response in the middle of the graph area, -50% to 50% area. Both side of the graph rather flat response, that means ' No more cornering with additional sttering' .
X axis means value of sterring operation, Y is cornering force smoothed in 0.3s term. It was found there are two kinds response, one is linear, proportional response in the middle of the graph area, -50% to 50% area. Both side of the graph rather flat response, that means ' No more cornering with additional sttering' .
2. At a R/C circuit at a dry condition I can get less number of data points because of battery empty. This data means higher cornering force than parking, ca.1.5G.
I can get less number of data points because of battery empty. This data means higher cornering force than parking, ca.1.5G.
3. At a R/C circuit at a wet condition When I started to log second data, it comes rainy, and tyre-grip was lowered as I can feel clearly. As the data, less force was indicated as 1.3to1.4G.
When I started to log second data, it comes rainy, and tyre-grip was lowered as I can feel clearly. As the data, less force was indicated as 1.3to1.4G.