お気楽一号
加速度検知式トラクションコントロール装置
後輪がホイールスピンした時に、自動的にスロットルをオフにしてくれるユニット
現在のところ、うまく作動していません・・・・。
最近はリアドライブ車の楽しさに目覚めてしまい、タミヤのF103+ルマン出場車ボディーで楽しんでいるのですが、これがやはり難しい。四駆車との一番の違いはアクセルワークのシビアさです。コーナリング出口ではステアリングをじわ〜っっともどしながらスロットルもこれまたじわ〜〜っといれないと、もう、すぐにマキマキ君サイクロンスペシャルです。タミヤサーキットでF103をうまく走らせている人を見ると、セッティングもさることながら、やはりドライビングテクニックが重要なんだな〜と思えます。
ここで「F103は一に練習二に練習。」と、重いコンダラ(注1)を引きながらサーキットに通うのが上達への近道なのでしょうが、そこはもう才能もなく情熱も枯れてしまったオヤジですから
「あのテクニックほしいのう。一万円で買えないじゃろか?」
などとつぶやきながらマキマキ君に悩んでいました。
(注1)重いコンダラ:昔、「巨人の星」のテレビの主題歌で「お・も・い〜こーんだーら・・・」というところで飛雄馬がグランド整備のローラーを引いているのですが、これをきいて「うんうん。たしかにあの"コンダラ"は重そうだ」と、激しい勘違いをしていたのでした。
そこで思いついたのは安易にも!!「マカないようになる装置」でした。わはは!
もしF103がマカなくなって操縦も簡単になれば、メンテも楽だし、ランニングコストも安いし、こりゃあまさにお気楽道の目指す理想の車体だ!ということで、なにやらおかしなことをはじめてしまったのでした。
F103がコーナー出口のスロットルオンで「巻く」ときには、後輪がホイールスピンしていると思います。リアタイヤのグリップ力はコーナリングフォースのためにほとんど費やされていますから、コーナー出口で急激な加速トルクを伝えるとタイヤのグリップを超えてしまい、スピンアウトしてしまうのだと思います。じゃあそのホイールスピンを初期段階で感知して、その瞬間、スロットルを緩めるようなことができればいいのでは・・・?という発想です。
前置きが長くなりました。では、概要から。
概要
○モーターの回転数を光学センサーで感知。ピニオンが一回転する時間を計測
○理論値を超える加速度で回転数が上がったときにはホイールスピンを起こしたものと判定。
○一定時間(10ms〜100ms)スロットルをオフにする。
走行計算(加速度の理論値を計算)
パラメーター(少し余裕をとってあります)
|
車重 |
1000g |
|
モーター |
タミヤスポーツチューンドモーター:
最高回転数 23,000rpm、 静止トルク 2kg-cm |
|
ギア比 |
ピニオン25T X スパー93T |
|
タイヤ径 |
55mm |
v = 7.741X10^-4 n (v;速度m/s、n ; 回転数rpm)
n = 23000-11500 Q (Q ; モータートルクkg-cm)
T = 1.353 Q (T ; 車体推進力 kg)
a = 9.8T (a ; 加速度m^2/s)
また、以上を積分して
t(時間s) = -0.671 log(-1.49v+26.52)+2.20
s(走行距離m) = 17.80 t +0.451exp(-1.48 t +3.2779) - 11.95
・・・この式で何がわかるかというと、
「スポチュンで1kgの車体を加速する時、一定時間にどの位の加速をするか」を求めることができ、これを超える加速が検出された時「ホイールスピン=マキマキ君発生」と考えられます。例えば・・・
この図でいうと、「5000rpm」「0.1秒後」「7400rpm」の関係を、走行計算の式で求めることができるということです。
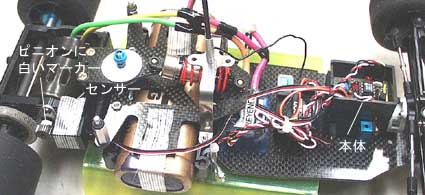
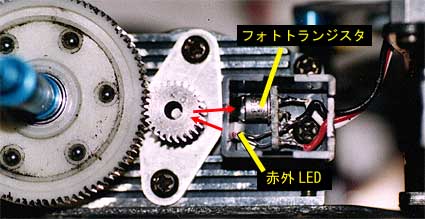
ユニットハードウェア
ピニオンの根元に白い紙片を貼りつけて、光学センサーのプローブにしています。センサーは一体型のフォトリフレクタを使えばもっとコンパクトになるんですが、近所の部品店に在庫がなかったのでとりあえずLEDとフォトトランジスタを自分で組み合わせました。
|
ユニット本体 |
センサー |
|
|
|
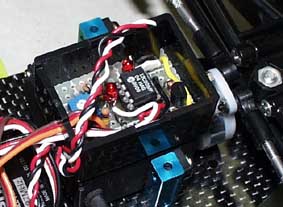
PIC12C509を使っています。
回路図はこちら
総重量はセンサー、コード類こみで20g。ケース類を工夫すれば10g以下になるかも・・・。
ソフトウェア
ピニオンギアが一回転する時間を毎回測定し、その前回の回転時間と比較して「正常な」加速かどうか判断します。もしデータよりも早すぎる加速が検出された時には一定時間(数十ms)受信機からの信号をカットし、スロットルオフにします。
○スロットルオフについて・・・
アンプは受信機からのパルスによって制御されていて、ニュートラル位置でも約1.5msパルスが出ていますので、本来ならこのユニットがスロットルオフする時にも1.5msパルスをアンプに送ってやらなければならないのですが、単純にカットするだけでもほぼニュートラル位置に戻るようだ・・・ということがわかったのでこうしています。ただこれは特殊な例で、ほかのメカの組み合わせでは違う動作をするかもしれません。
使用メカ : レシーバー = JR R200、 アンプ = KEYENCE A-01N
プログラミングは三日三晩うんうんうなった末に一応動くものができました・・・。
|
|
3日間のデバグ戦争で犠牲になったPIC
書きこみは一回のみなのでプログラムに
バグがあるともう使えません。
|
データを拾ってくる所がうまくいかなくて、結局IF文の羅列にしてしまったので、データ精度が荒くなってしまいました。
今後、実地テストを繰り返してデータを最適化するつもりです。
|

|
→拡大 |
|
暫定パラメータ版ですが、ソースファイルを一応ここにおいておきます。
走行テスト1回目(00/03/13)
平日だというのにタミヤサーキットに出撃しました。「普通はマキマキになる所を、お気楽ユニットONで巻かなくなる」ということが体感できればいいなあと思って出かけました。天候は快晴、風は強いが気温は高め。路面温度も高く、最高のグリップでした。そうです。こういう日に限って、どんなセッティングにしてもマキマキ君になってくれないのです(泣)。もう最後はウイング取り外したり、リアタイヤにグラステープ貼ったりする始末。結局は夕方になって気温が下がり、やっとほどよいマキマキ君(当社比35%)になってくれました。で、・・・
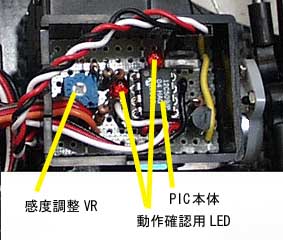
●屋外での作動確認
これまでの作動テストは部屋の中で行っていたため、今日のような屋外では明るすぎてセンサーがうまく作動しませんでした。(感度調整VRの範囲を超えていました)。そこで200Ωの抵抗を短絡してちょうど良い感度にする事ができました。
●実走行インプレッション
(1)コーナー後半〜脱出の「立ち巻き」は明らかに激減します!車体が出口さえ向けばあとはフルスロットル!四駆の感覚です。
(2)ただしオーバースピードでコーナーに侵入した場合、特にステアリングを大きく切った状態で、スロットルオフのままで、あるいはほんのわずかなスロットルオンでも発生する巻き、いわば「横滑り巻き」には効果がありません。
(3)中速コーナーの立ちあがりがマイルドになるので、「ここ一番」の加速感が得られません。ただし、ストレートの伸びには影響はないようです。
といったところでしょうか。今日のような高グリップ路面が確保できている時には、(1)の「立ち巻き」はよほどあらいスロットル操作をしないと発生せず、(2)の「横滑り巻き」方が(僕のようなヘタッピには)問題になるので、あまりメリットを感じられませんでした。前回出場したタミヤGPの時ような「直線でもちょっとスロットル入れればマキマキ状態」の低グリップ時に効果がありそうです。この検証は今後の課題とします。
というわけでこのユニット、これからの季節はあまり効果ないかも(笑)。冬を待つか・・。
どうもこのユニット、つけたから速くなるというキャラクターではなく、低グリップ時のミスを防止する安全装置といった性格でしょうか。ま、お気楽だからそれはそれで重要。
こまかいところでは、ホイールスピン発生時のスロットルオフ時間を90ms、45ms、20msとした3種類のPICを試し、一番感触が良かったのは45msでした。90msでは失速しすぎ、20msでは効果が少ないようでした。
走行テスト2回目(00/03/20)
今日も非常に暖かい日で、グリップは最高でした(泣)。前回よりもさらに良く、タイヤがあったまった状態ではもう、巻こうと思っても巻けません。というわけでテストには最悪の(笑)コンディションだったのでデータは取れなかったのですが、気がついた点が一つ。
前回のテストではセンサーの感度調整がうまくいっていなくて、走行中、時々作動していない時があったようです。再調整の結果、今日はきっちり作動しているようで、がばっとフルスロットルにしても、じわ〜っと、とっても慎重な加速をしてくれます。でもちょっとききすぎ。要は遅いんですな(笑)。今日のような高グリップ路面では、がばっと開けても大丈夫なので、ちょっといらいらします。やはりこのユニット、極端にグリップが悪い時まで活躍はおあずけ。
その後の考察(00/04)
その後、このユニットの問題点を考えてみました・・・
(1)実は高回転側で回転数がきちんと測定されていなかった
(2)ホイールスピン判定は理論値のみに基づいている
最後に一言