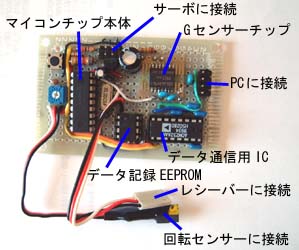
 本体はPIC16F84です。「レヴロガーPlus」にGセンサーを付け足して設計、作製しました。大きさは7X4.5cmくらい、20g以下です。
本体はPIC16F84です。「レヴロガーPlus」にGセンサーを付け足して設計、作製しました。大きさは7X4.5cmくらい、20g以下です。回路図はこちら
{kind=link}
PICのソースファイルはこちら
いつものようにF103LMに載せてテストしました。まず、駐車場で。うまくいくかな・・・。
コーナリングフォースの実測に成功!
お気楽レヴロガーG
00/09/24
なかなか興味深いデータがとれたのですが、前後方向の加減速、横方向のコーナリングフォースのほかにもやはり細かい振動を拾ってしまうようで、期待したよりばらつきの大きいデータになっていました。
そこで今回は10msごとに横Gを測定、記録するユニットを作りました。並行してサーボパルス、モーター回転数も約300ms周期で測定します。
○約170秒間の走行データを測定、記録
○コンピューターに接続してデータをダウンロード
○加速度センサーパルス幅(16ビット、単位us、10msX30回)−サーボパルス幅(16ビット、us、20ms)−回転数(16ビット、330msのピニオン回転数、10ms)
本体はPIC16F84です。「レヴロガーPlus」にGセンサーを付け足して設計、作製しました。大きさは7X4.5cmくらい、20g以下です。
回路図はこちら
PICのソースファイルはこちら
いつものようにF103LMに載せてテストしました。まず、駐車場で。うまくいくかな・・・。
読み出したデータを加工して、一部抜粋(170秒間のうちの30〜60s区間)したグラフです。■がステアリング操作(左目盛)、・・・・が横方向の加速度、つまりコーナリングフォースです(右目盛)。右にステアすると車体は右に曲がり、コーナリングフォースは左側にかかります。このグラフでは見やすくするためにコーナリングフォースの目盛を逆方向にしてあります。
おお!いいじゃ〜ん!!これこれこのグラフっす!欲しかったのは!ステアとGがよく対応してるし。
同時に速度のログも。
●が速度です。とり逃しているポイントもありますが、一応動作しています。
いいじゃんいいじゃん。しかし結構「振動」ってすごいんですね。特に55秒以降では「ブレ」の幅が1G以上もあります。(高速コーナリング中の典型例ではブレの分散値は約0.2Gでした)。
動作確認ができたので、いざ静岡(タミヤサーキット)へ!・・・と思ったら降水確率70%!・・・かまわん。突撃。(笑)
実際、サーキットに到着して20分もたたないうちに雨が降り出してしまいました。でもなんとか、データが2本とれたぞ!!
 (一部抜粋)
(一部抜粋)
回転センサーを調整している時間がなかったので、残念ながら速度ログは今回は取れませんでしたが、Gの方は完璧です!やったやった!
駐車場に比べてブレの幅は少ないです。さすがサーキット。あたりまえか。
ブレをとるために330msごとの平均をとってみるとこのグラフ↓が、
こうなります↓ 青がステア、赤がGです。
青がステア、赤がGです。
いいじゃ〜ん。ますますよく一致します。おもしろいのはステアリング操作(青)に少し遅れて実際のコーナリング(赤)をしているのがわかることです。遅れは0.2秒くらいでしょうか。ロギングはG→ステアの順にサンプリングしているので、プログラム上の遅れではありません。
次に、ステア操作に対してどのくらいのコーナリングフォースが出ているのかを調べてみます。
(1)駐車場での走行 横軸がステアの操作量、縦軸がコーナリングフォース(300msで平滑化した値)です。ステアに対して完全にリニアに反応する場合、このグラフ中の各点は、左上から右下を結ぶ直線を中心に分布するはずですが、あるところまでステアを切ったところで(青の点線より外側)、それ以上コーナリングフォースが増加しない(赤点線より外側にいかない)ことが分かると思います。
横軸がステアの操作量、縦軸がコーナリングフォース(300msで平滑化した値)です。ステアに対して完全にリニアに反応する場合、このグラフ中の各点は、左上から右下を結ぶ直線を中心に分布するはずですが、あるところまでステアを切ったところで(青の点線より外側)、それ以上コーナリングフォースが増加しない(赤点線より外側にいかない)ことが分かると思います。
これは、「より舵角を切ってもそれ以上は曲がらない」、いうなれば「ムダな舵角」を数値として観測できたということです。
ここでは統計的な処理をして・・・というわけではなく、ぱっと見て適当に線をひきましたが(笑:心眼とも言う)、何となく「最大コーナリングフォースは約1.4Gで、舵角60%で頭打ちになる」ことが直感的に推測されます・・。
※厳密には、ステアとコーナリングフォースの関係は速度によっても変わってきますから、各速度域で個別に解析したかったのですが、今回は回転数のログがうまく取れなかったのでとりあえず全部一緒にして解析してみてます。前述したステア操作とコーナリングのずれもあるので、そこもさらに補正する必要があるかもしれません。
(2)タミヤサーキット一本目 データポイント数が少ないのは、ロギングの途中でバッテリがタレたからです(笑)。
データポイント数が少ないのは、ロギングの途中でバッテリがタレたからです(笑)。
この時にはまだ雨は降っておらず、セッティングも割とうまくきまっていたので結構「気持ちよく走れた」結果です。
「何となく」駐車場よりはGが大きいように見える程度です。感覚的には全然違うんですけど、やっぱり統計的な処理をして有意差がつくかどうか検定してみる必要があるかな・・?
「心眼」によると最大コーナリングフォースは1.5G。以前1.0Gと予測していましたが、まあその時よりグリップも高いしセッティングも決まってた気がするのでいいのかな・・?
(3)タミヤサーキット二本目 二本目はフルタイムロギングできたのですが大粒の雨が降り出していまして、グリップは最悪でした。
二本目はフルタイムロギングできたのですが大粒の雨が降り出していまして、グリップは最悪でした。
スロットルは握れないし、少しでもステアをこじろうものならすぐスピンです。データでも左右50%くらいまでしかほとんどステアを使っていない事が分かると思います。
グリップは最大1.3-1.4G、最大効率舵角は(なんとたったの)40%と推測されます。
ドライ路面(2)とウェット路面(3)ではグリップの体感としては、もう雲泥の差だったんですが、データ上は(特に最大グリップで)そんなに差が出ているようには見えないですよね。離れたところで操縦しているにもかかわらず、この微妙な差を(ヘタッピの私でも)明らかに体感できてしまう人間の感覚というのは、やっぱりスゴイと思います。特に(3)のグラフの左上部分で、意識していなくてもコーナリングの最大効率付近(青点線と赤点線の交点)に操作が集中しているのには、我ながら感心してしまいました。
ともあれ、なんとかコーナリングフォースを実測することに成功しました。精度が上がれば、ゆくゆくはセッティングの定量化など強力な方法論になりうると思います。
これまでの僕の目標は「F103のドライビングを楽にする」ユニットを開発することでした。これは、特に僕のようなヘタッピに多い、ドライビング感覚の欠けている部分を電子装置で補うことを目標にしていました。
しかし、ヘタッピな私でも、Gセンサーがつかみきれていない微妙な差まではっきりと体感していたのです。これはホントに意外でした。
そこで!「F103お気楽化ユニット計画」は少し方向転換します。人間の感覚を「補う」のではなく、「引き出す」方向です。・・・?わかりにくいですね(笑)。詳しくは乞うご期待!!