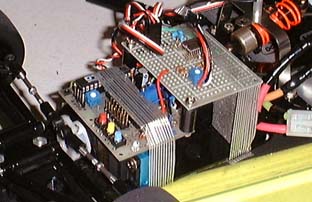

2階建てです。下の階が屋台ボード、上がGセンサーや回転センサー関連の部品です。ボード重量42g。
Gセンサーです。小さいっす!


あやしい2段がさね・・・
今回新採用の回転センサー(フォトインタラプタ)、TLP909です。めちゃくちゃ調子よかったです。
AORc presents
データロガープロジェクト
Gセンサー(加速度センサー)搭載!
00/08/22
さて、今回はとうとう夢の加速度センサーを搭載することができました!
今回使った加速度センサーはANALOG DEVICE社のADXL202です。小さなチップなんですが、XY2軸方向の加速度を感知できて、これをパルス幅に変換して出力してくれます。えらい!!
これまで本HPではラジコン走行時の力学的な考察を行ってきました(走行計算参照)。結果として、前後方向の力学、つまり加減速に関してはまあまあ納得できる精度で計算(サーキット周回データの解析)することができるようになったと思っていますが、左右方向の加速度、つまりコーナリングに関してはまだまだ現実から程遠い、と思わざるを得ないレベルでしかシミュレートできていません。・・・・要はムツカしいんです(笑)。
そこで、今後の方向性として、コーナリングに関しては理論から詰めるよりも経験則から攻めた方がいいのかな・・・と思っています。つまり試行錯誤ですね(笑)。・・・ここで必要になるのがコーナリング性能の実測値、つまりコーナリングフォース(=横G)なんです。普通はこれを感覚でフィードバックしてセッティングを詰めていくのですが、例えばこれを定量化できたら、経験則といえどもそこから新しい理論が生まれてくるかもしれません。おもしろそうですよね。そこでこのユニットの出番!ということになります。
|
|
|
|
2階建てです。下の階が屋台ボード、上がGセンサーや回転センサー関連の部品です。ボード重量42g。 |
Gセンサーです。小さいっす! |
|
|
|
|
あやしい2段がさね・・・ |
今回新採用の回転センサー(フォトインタラプタ)、TLP909です。めちゃくちゃ調子よかったです。 |
これまで回転センサーには赤外LEDとフォトトランジスタを自分で組み合わせたものを使ってたのですが、今回はパーツとして2つがモールドされているTLP909を使いました。性能自体は自作センサーとそんなに変わらなかったのですが、ピニオンマーカーに白い紙ではなく「反射テープ」を使ったところ、感度が飛躍的に改善されたようで、今回のテストを通じてとうとう一度の取りこぼしもありませんでした。ブラボー!
今回izu@師匠より提供されたプログラムは
○電圧
○スロットル開度
○ステアリング操作
○X軸加速度
○Y軸加速度
○モーター回転数
の6つを同時に記録、LCD表示、またはコンピュータにダウンロードし、参照できるというものです。すばらしい!
まず、キャリブレーションをかねてGセンサーのテストをしてみました。
車体に対して、青はY(前後)方向、紫はX(左右)方向です。
まず車体のフロントを上にして直立、逆にして倒立、次に右側面を上にして90度ロール、最後に左を上にして90度。というデータです。思ったよりもきれいにでてくれたので感激です。
で、さっそくサーキット走行だ!
(F103LM、Sports tunedモーター、ピニオン25T)
生データはこちら・・・・
ちょっとわかりにくいですが(^^; オレンジ色のグラフが速度(モーター回転数)、紫は横G(=コーナリングフォース:正の値が左コーナー)です。
速度データはきれいにとれてますが、コーナリングフォースの方はちょっと上下動が激しいかな(特に緑の○とのころ)?と思います。これはノイズか、あるいは、走行中の車体は常に細かく振動していますので、これを拾ってしまったかな?とも考えられます。
上のグラフは前後方向の加速度(緑のグラフ)です。正の値が加速、負は減速です。こっちの方は横Gに比べて安定してるようです。(それでも「おや?」というポイントはありますが・・・)
以上は一周分のデータですが、このユニットは一回に約40秒、3周分のデータがとれます。これを5回繰り返し、約15周分のデータを取りました。以下はその結果を統合して解析したものです。
(1)Gx(横G)−Gy(縦G)プロット
横軸がGx、縦軸がGyです。本当は円形(菱形か?)、あるいは十文字型に集まってほしいところですが、今回はそういう傾向は見られませんでした。
(2)ステアリング操作−横Gプロット
ステアを切るほどに横Gが発生している様子がわかります。「ある程度ステアを切ると、それ以上は曲がらない」、つまり「ムダな舵角」を見たかったのですが、今回はちょっとそこまではわかりませんでした。
(3)走行スピード−加速度
理論的にはモーターの特性上、速度が上がるほど加速度は低くなります。今回の測定結果もそういう傾向は見えますが、すこしノイズっぽい点が多いかな・・?と思います。
(下グラフは以前別のユニットで測定した時の解析結果、赤線は理論式による最高加速度)
(4)速度とコーナリングフォース
コーナリングフォースと速度の相関は見られませんでした。
以上の結果をみてみますと、Gセンサーは割ときちんと働いているようなのですが、すこしノイズっぽい測定点が多々みうけられます。走行中の車体の振動を拾ったものと思われますので、今後はそのへんを重点に改良すればいいのでは?と思っています。
結論:Gセンサー、おもしろい!サンプリング回数を多くして、平均化するのがキーポイントか?
![]()